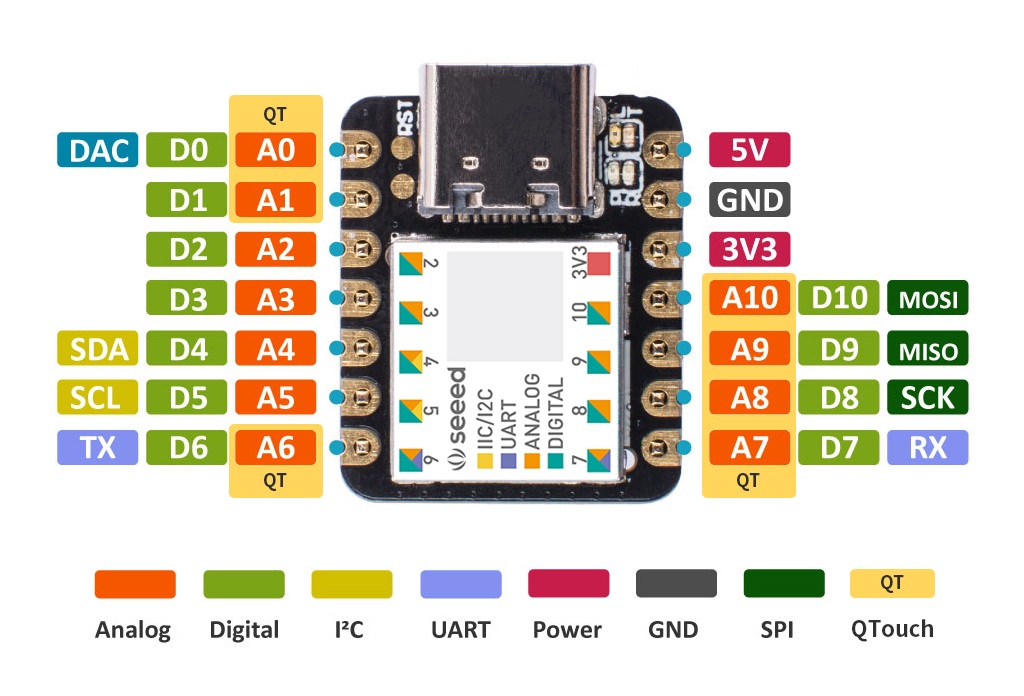
The 3D-Printed robotic arm is actuated by six stepper motors and controlled from a computer. The PI is running a WebIoPi server which schedules python scripts on the PI. The scripts calculate inverse kinematics and use TMC2208 stepper drivers to drive FYSETC stepper motors. A Seeeduino XIAO connected to the PI reads analog inputs from potentiometers on the joints and relays the information.