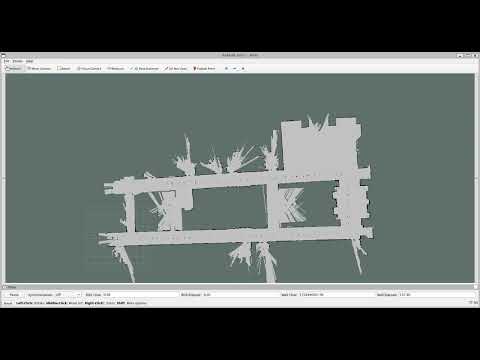
build_map_bag_box.launchで各種パラメータをデフォルトの値にしてgmappingを実行
https://github.com/open-rdc/orne-box/blob/noetic-devel/orne_box_navigation_executor/launch/build_map_bag_box.launch
わりと良い地図を書くこともあるが,始点と終点が繋がらない地図になる.
ジャイロオドメトリのみで作成した点群の方がずれが少ない.
#94 (comment)
その要因であるが,ジャイロオドメトリとLiDARの時間的なずれによる影響が大きいと考える.
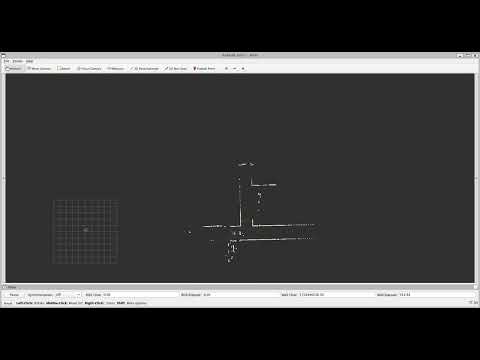
以下に,ジャイロオドメトリに従い,LiDARを表示した動画を示す.
LiDARは固定された壁を検出しているため,本来は揺れることなく一定であることが望まれるが,動画のように揺れている.
この揺れを補正するように自己位置を変更すると,歪の大きな地図になると考える.
対策としては,以下が考えられる.
1)ジャイロオドメトリとLiDARを統合するときの時間的なずれを最小限にする.
2)LiDARの検出距離を伸ばす.
意図的でははないが,おそらく現在は10m程度しか検出していなさそうである.
ただし,動画にあるように地面を壁と検出しているところがあるので,距離を伸ばすためにはその対策が必要である.
あと,今回判明したこととして,上記の時間のずれを取り切れない場合は,
・地図用のデータを取得しているときはできるだけ急旋回しないようにすることが必要である.
build_map_bag_box.launchで各種パラメータをデフォルトの値にしてgmappingを実行https://github.com/open-rdc/orne-box/blob/noetic-devel/orne_box_navigation_executor/launch/build_map_bag_box.launch
わりと良い地図を書くこともあるが,始点と終点が繋がらない地図になる.
ジャイロオドメトリのみで作成した点群の方がずれが少ない.
#94 (comment)
その要因であるが,ジャイロオドメトリとLiDARの時間的なずれによる影響が大きいと考える.
以下に,ジャイロオドメトリに従い,LiDARを表示した動画を示す.
LiDARは固定された壁を検出しているため,本来は揺れることなく一定であることが望まれるが,動画のように揺れている.
この揺れを補正するように自己位置を変更すると,歪の大きな地図になると考える.
対策としては,以下が考えられる.
1)ジャイロオドメトリとLiDARを統合するときの時間的なずれを最小限にする.
2)LiDARの検出距離を伸ばす.
意図的でははないが,おそらく現在は10m程度しか検出していなさそうである.
ただし,動画にあるように地面を壁と検出しているところがあるので,距離を伸ばすためにはその対策が必要である.
あと,今回判明したこととして,上記の時間のずれを取り切れない場合は,
・地図用のデータを取得しているときはできるだけ急旋回しないようにすることが必要である.